| Emergence of portable, low-cost Unmanned Aerial Vehicle (UAV) for domestic uses has catalyzed a variety of UAV-based data-driven applications in modern urban planning, such as massive data collection; precise survey for traffic flows and behavior analysis; and 3D visualization. In any case, flying a drone requires a map to guide flying path, height, and direction. Currently, most available and easily usable maps are in 2D and involve very limited 3D information. In this research, I propose a new concept that aims at guiding creation of 3D maps serving for UAV-based services | 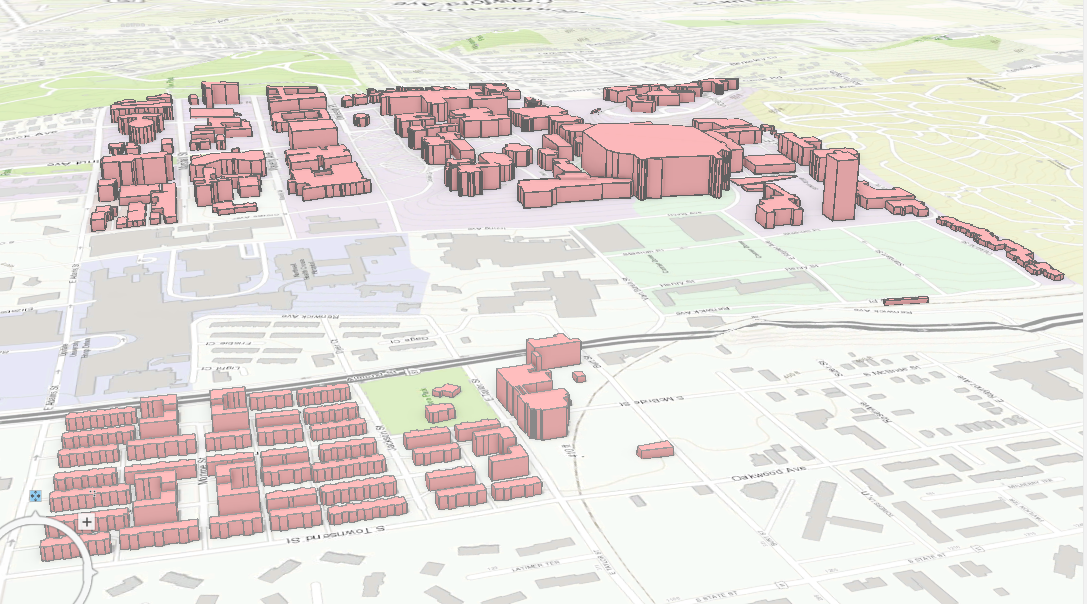 |
